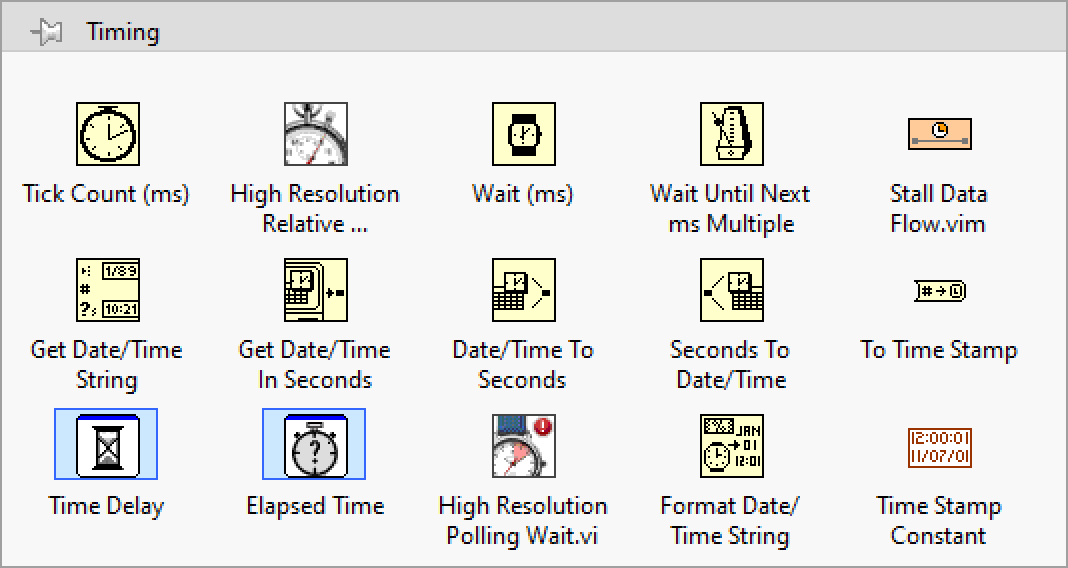
Controlling the time between loop iterations and being able to measure the time between events are both very important tasks in any data acquisition activity. LabVIEW has a number of built-in timing functions that can help with these tasks. These are available in the Programming»Timing palette as shown below.
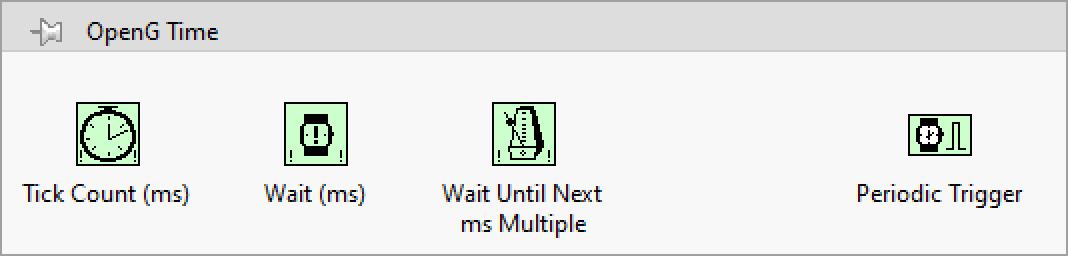
In addition, the OpenG Toolkit has a number of very useful timing VIs that add functionality to the built-in routines.
When using these timing VIs it is important to understand that some of them will cause your code to delay, while others will immediately report current or elapsed time information. In the following discussion the most often used of these VIs are grouped into categories of those that introduce a delay, those that report the current time and those that report an amount of elapsed time.
VIs That Introduce a Delay
VIs That Report the Current Time
VIs That Report the Elapsed Time
Examples
Benchmarking Code
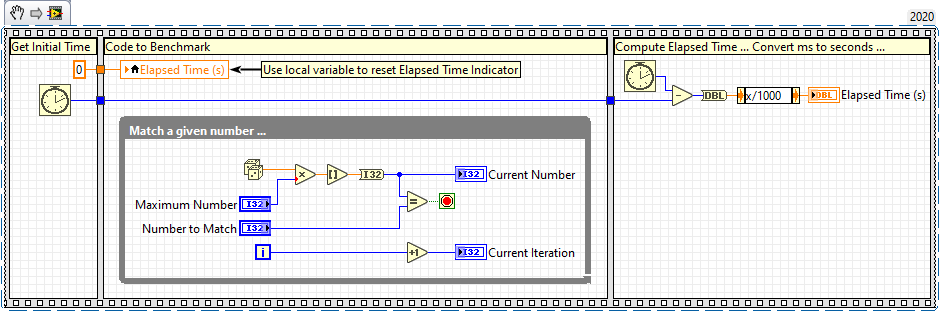
A common use of the Tick Count (ms) function is for benchmarking the execution speed of a block of code. In the figure below the initial time is measured in the first frame of the sequence structure, the code of interest is put in the second frame, and the final time is measured in the last frame. The execution time is computed by taking the difference in these two values of the millisecond timer and then dividing by 1000 to convert to seconds.
Comparing Wait (ms) and Wait Until Next ms Multiple
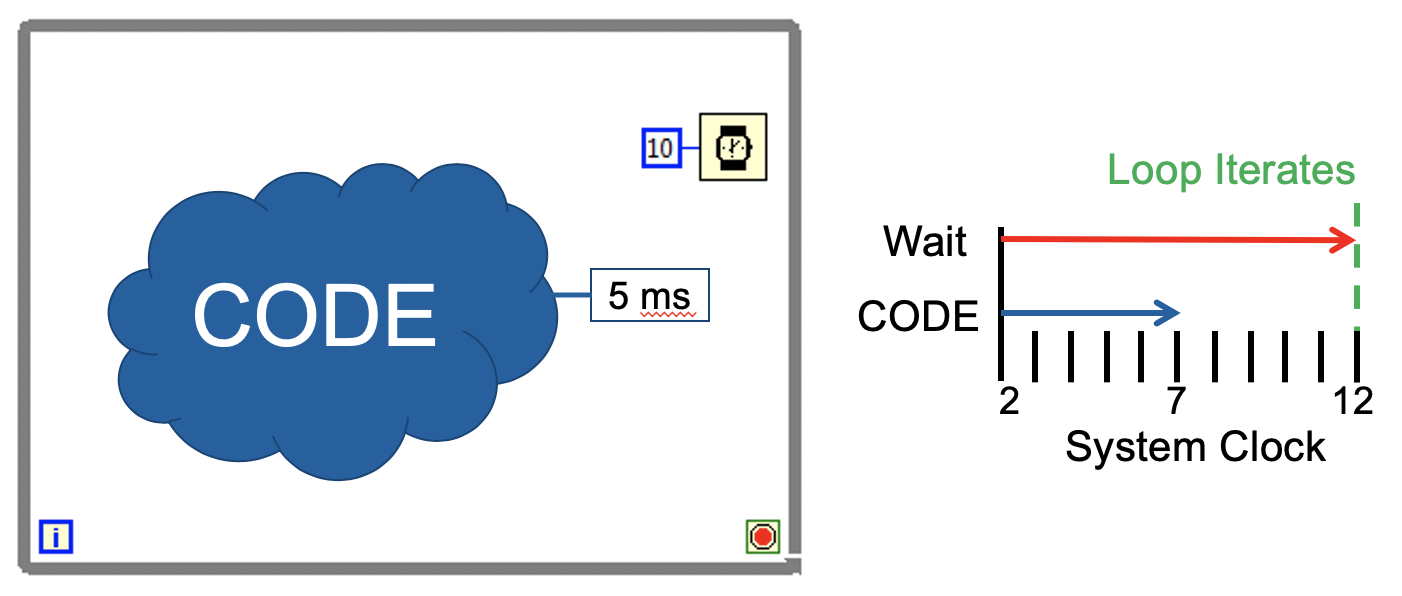
The diagram below shows how the Wait (ms) operates to control the elapsed time of each loop iteration. In this figure notice that there is a segment of code that takes on the order of 5 ms to execute. There is also a Wait (ms) function that is set to introduce a delay of 10 ms. Notice that there is no data dependency between this block of code and the Wait (ms) function which means that the Wait (ms) node will begin executing at the same time as the rest of the code in the loop. Since the code in the loop takes less time to complete than the input to the Wait (ms) function, the Wait function will cause the loop to delay 5 additional milliseconds for a total delay of 10 ms.
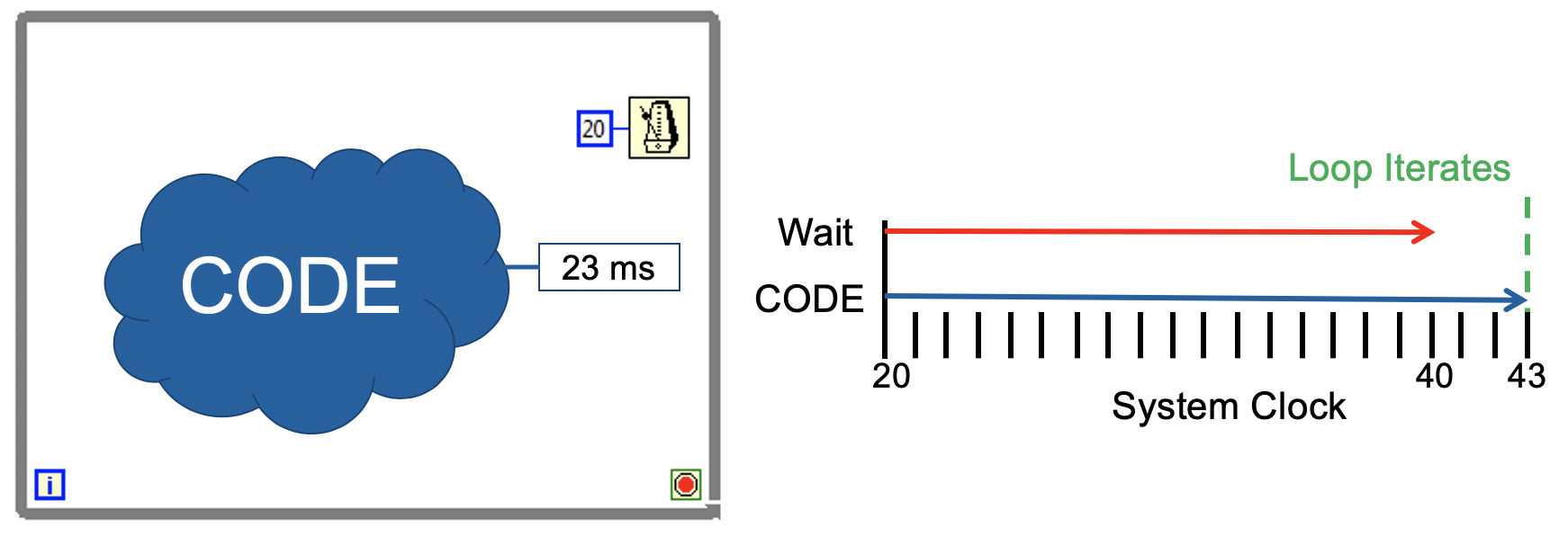
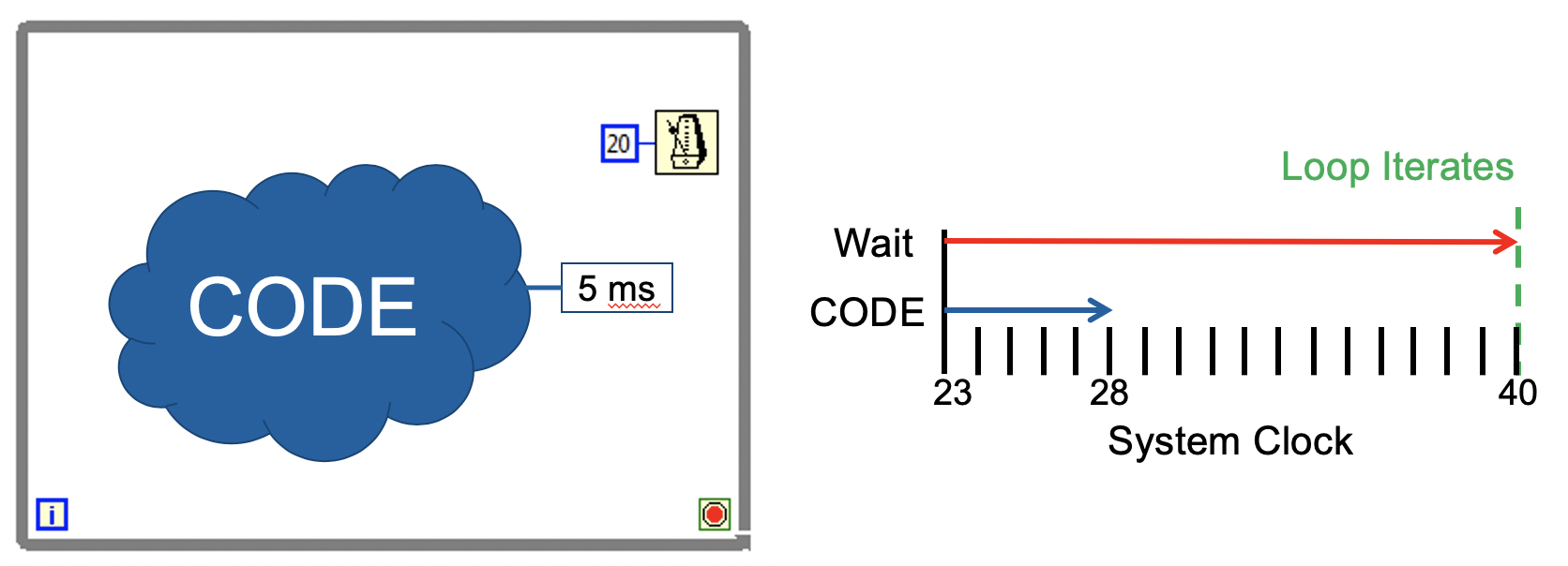
The Wait Until Next ms Multiple operates in a similar fashion but there are important differences. This wait function will ensure that the loop completes when the ms time is a multiple of its input value. In the example below, the CODE will execute in 5 ms, and the loop will not iterate until a multiple of 20 ms is reached on the system clock. As you can see from this example, the loop period may be less than 20ms in the first iteration, but subsequent iterations will be the desired time.
The Wait Until Next ms Multiple VI can be useful when you have multiple loops running an you wish to synchronize them so that they all end at the same times.
The following examples compare using Wait (ms) and Wait Until Next ms Multiple. Drag these VI snippets to empty block diagrams and test them separately to make sure you understand their operation.
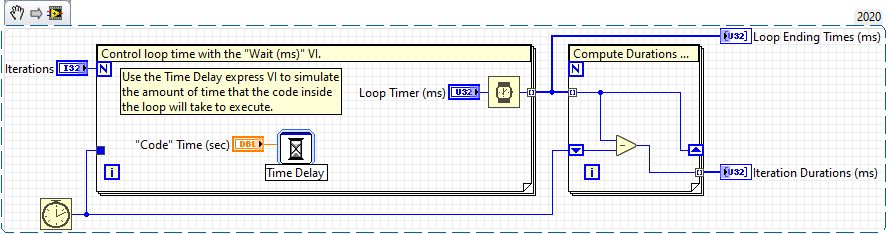
Using Wait (ms)
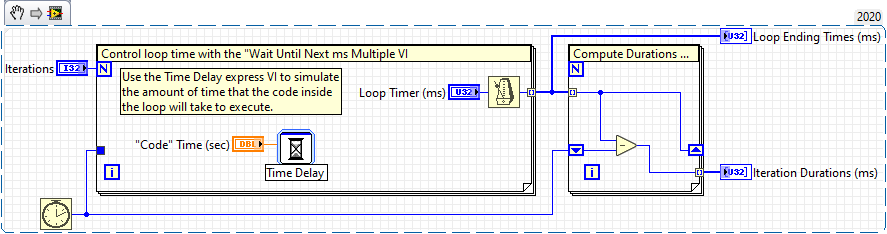
Using Wait Until Next ms Multiple
In these examples additional code has been added to compute the amount of time that each iteration of the loop took to complete. Notice that with the Wait Until Next ms Multiple VI that the first loop iteration is likely less than the desired time but that each iteration of the loop ends with the millisecond timer at a multiple of the desired wait time. Also notice that there is a small amount of jitter, usually no more than 1 ms, in the loop execution times.
Finally, it is important to note that if the “code” in the loop takes longer to execute than the desired wait time then neither of these delay routines will give the proper loop iteration period as depicted in this graphic below. You can easily verify this if you use either of the VI snippets from above.